Израильские исследователи разрабатывают многофункциональную роботизированную руку
Исследователи из Университета им. Бен-Гуриона в Негеве разработали роботизированную руку, которая может использоваться в космосе и на фабриках, для сбора фруктов, для поиска и спасения, для выполнения медицинских процедур и во многих других областях применения.
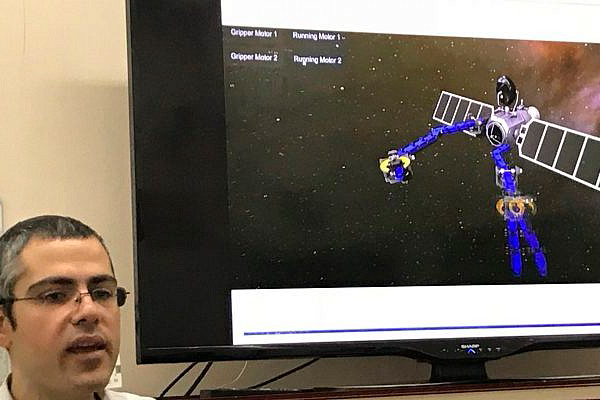
Малогабаритный серийный робот BGU (MASR) работает так же, как робот-змея, у которого есть много подключенных двигателей для перемещения каждого канала, за исключением того, что он использует только два двигателя – один для перемещения по конструкции, а другой – для поворота соединения, которое ему нужно сгибать. «Эта уникальная минималистическая конфигурация, которая может быть применена к любому серийному роботу с двумя или более звеньями, снижает вес, размер и стоимость», – сказал д-р Давид Заррук, старший преподаватель кафедры машиностроения BGU и руководитель отдела биоиндустрии и лаборатория медицинской робототехники. Это позволяет роботизированному манипулятору достичь широкого диапазона движений с использованием нескольких приводных механизмов, что невозможно с другими роботами. «Этот робот прост в эксплуатации и, имеет ряд сфер применения, включая космос, сельское хозяйство и промышленность», – пояснил он.
Конструкция робота идеально подходит для применения в космосе из-за его небольшого веса и может использоваться для устранения неисправностей спутников, а также для стыковки или дозаправки, для увеличения срока службы спутников. Заррук также предлагает в качестве другого потенциального применения сбор фруктов с деревьев. «Конфигурация робота MASR сочетает в себе лучшие характеристики существующих технологий роботов для достижения высокого уровня точности и контроля», – сказал он. «Кроме того, возможность добавить или убрать до четырех звеньев менее чем за минуту, чтобы сделать руку длиннее или короче, позволяет провести целевой быстрый ремонт в изолированных секциях».
Исследователи BGU также экспериментируют с добавлением двигателей для увеличения скорости и изучают способы применения своей концепции с минимальным управлением для движущихся роботов, используя двигатели, которые могут менять положение вдоль ног и перемещаться от одной к другой, когда это необходимо.